作业
-
2025年秋江苏开放大学管理理论与实务形考作业三答案
70分,介意勿买 一、2025年秋江苏开放大学管理理论与实务形考作业三单选题答案 1、管理具有与生产关系、与社会制度相联系的一面,这里是指() A、管理的艺术性 B、管理的自然属性 C、管理的社会属性 D、管理的科学性 学生答案:C 2、沟通可以分解为以下过程() A、信息收集与信息编码、信息传递渠道的使用、信息接受与解释信息 B、信息接受与解释信息、信息传…
-
2025年秋江苏开放大学中外文化艺术概观测试题二答案
一、2025年秋江苏开放大学中外文化艺术概观测试题二单选题答案 1、波德莱尔的《恶之花》是属于()。 A、存在主义 B、超现实主义 C、表现主义 D、象征主义 正确答案:D 2、“劳动创造人本身”是()论断。 A、列宁 B、普列汉诺夫 C、马克思 D、恩格斯 正确答案:D 3、兴于诗,立于礼,成于()。”(《论语》)。 A、乐 B、让 C、恭 D、德 正确答…
-
2025年秋江苏开放大学文化产业概论形成性考核2答案
一、2025年秋江苏开放大学文化产业概论形成性考核2单选题答案 1、下列属于准公共文化产品的有【】 A、出版物 B、图书馆 C、CCTV D、电影院 正确答案:B 2、影响文化产品价格的外部因素主要有成本、生命周期、【】、供求关系、盈利模式、产品自身异质性等。 A、经营管理 B、资源整合 C、市场定位 D、市场响应 正确答案:C 3、古董、古玩、名人字画等独…
-
2025年秋江苏开放大学土木工程概论第三次形考作业答案
一、2025年秋江苏开放大学土木工程概论第三次形考作业单选题答案 1、机场的定义是指在陆地上或水面上一块划定的区域(包括各项建筑物、装置和设备),其全部或部分用来供航空器着陆、()和地面活动之用 A、维修 B、起飞 C、候机 D、飞行 学生答案:B 2、路面是一种层状结构,路面结构可以分为面层、基层和()三个层次。 A、排水层 B、沥青层 C、垫层 D、碎石…
-
2025年秋江苏开放大学实用法律基础第五单元自测题答案
一、2025年秋江苏开放大学实用法律基础第五单元自测题单选题答案 1、我国刑法处罚的是() A、一切违法行为 B、构成犯罪的行为 C、造成了社会危害的行为 D、触犯了刑律的行为 正确答案:B 2、一般累犯是指被判处有期徒刑以上刑罚的犯罪分子,刑罚执行完毕或者赦免以后,在()年以内再犯应当判处有期徒刑以上刑罚之罪的犯罪人。 A、4 B、2 C、3 D、5 正确…
-
2025年秋江苏开放大学数据库系统原理第三次作业答案
一、2025年秋江苏开放大学数据库系统原理第三次作业单选题答案 1、关系数据库规范化理论的各范式中,()是一个可用的关系模式应满足的最低范式。 A、3NF B、2NF C、BCNF D、1NF 正确答案:A 2、有关系模式R(A,B,C,D),函数依赖集F={A→C,B→D},分解r={ABD,AC}相对于F()。 A、是无损连接分解,也保持函数依赖 B、不…
-
2025年秋江苏开放大学维修电工实训第4次形考作业答案
一、2025年秋江苏开放大学维修电工实训第4次形考作业单选题答案 (1)四色环电阻的第四环颜色是金色,对应的误差是( A ) A: 5% B: 10% C: 20…
-
2025年秋江苏开放大学维修电工实训第3次形考作业答案
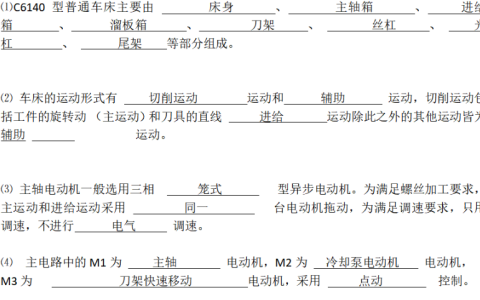
【实训一:CA6140车床电气实训】(共计50分) 1.填空题 2.《CA6140车床故障电气调试》课程实验报告 (32分) 【实训二:X62W铣床电气实训】(共计50分) 1.填空题 2.《X62W铣床故障电气调试》课程实验报告 (32分)
-
2025年秋江苏开放大学管理学原理第三次作业范文
星云科技是一家成立仅两年的科技初创公司,专注于企业级软件开发。团队由一群充满激情的年轻人组成,从最初的5名成员迅速扩展到如今的50人。随着公司业务的快速增长,团队规模的扩张也带来了新的管理挑战。李总,作为公司的创始人兼CEO,是技术出身,在技术领域有着深厚的造诣。他为公司奠定了坚实的产品和技术基础,但在管理方面逐渐暴露出一些问题,这些问题对团队的效率和士气造…
-
2025年秋江苏开放大学机械制造技术第二次作业答案
一、2025年秋江苏开放大学机械制造技术第二次作业判断题答案 1、单件生产时,对操作工人的技术水平要求较高。 A、正确 B、错误 正确答案:A 2、浮动支承是为了增加工件的刚性和定位稳定性,并不限制工件的自由度。 A、正确 B、错误 正确答案:B 3、不完全定位消除的自由度少于六个,没有满足加工精度要求。 A、正确 B、错误 正确答案:B 4、拉削加工在拉刀…