作业
-
2025年秋江苏开放大学工业工程基础第二次作业答案
一、2025年秋江苏开放大学工业工程基础第二次作业单选题答案 1、工业工程最重要的基础技术是()。 A、工作研究 B、系统工程 C、功效学 D、运筹学 学生答案:A 2、动素分析(Therblig)的基本动作元素有()。 A、17个 B、21个 C、15个 D、24个 学生答案:A 3、大型企业或公司的工业工程部门的三种组组织结构形式分别是矩阵式、集中式和(…
-
2025年秋江苏开放大学工业工程基础第一次作业答案
一、2025年秋江苏开放大学工业工程基础第一次作业单选题答案 1、以操作者为对象开展程序分析适宜采用()。 A、人一机操作分析 B、人型流程图分析 C、物型流程图分析 D、双手操作分析 学生答案:D 2、工业工程与工作研究同其它专业工程相比更重视的是()。 A、物的因素 B、环境因素 C、人的因素 D、技术因素 学生答案:C 3、泰勒是科学管理的创始人,他创…
-
2025年秋江苏开放大学教育心理学作业一答案
一、2025年秋江苏开放大学教育心理学作业一单选题答案 1、教育心理学主要研究是学校教育中的()。 A、学生的学习 B、教育措施 C、学校环境 D、教与学的规律 学生答案:D 2、以下哪项不属于教育心理学的研究对象()。 A、学生的学习兴趣 B、学习动机 C、教师的工作压力 D、教师的社会地位 学生答案:D 3、在学与教的过程中,要有效传递的主要信息是()。…
-
2025年秋江苏开放大学机械制造基础第一次作业答案
一、2025年秋江苏开放大学机械制造基础第一次作业单选题答案 1、下列哪种材料属于有色金属() A、碳素钢 B、铜合金 C、铸铁 D、合金钢 学生答案:B 2、钢的淬火工艺目的是() A、消除内应力 B、提高硬度和耐磨性 C、细化晶粒 D、降低硬度,改善切削性能 学生答案:B 3、自由锻的基本工序不包括() A、弯曲 B、压铸 C、拔长 D、镦粗 学生答案:…
-
2025年秋江苏开放大学会计基础第一次任务答案
一、2025年秋江苏开放大学会计基础第一次任务单选题答案 1、会计信息质量要求中的()要求企业的会计信息必须能确切地反映经济活动的本来面貌,必须是真实的、可核实的。 A、可比性 B、相关性 C、可靠性 D、重要性 正确答案:C 2、在()假设下,企业应当对其本身发生的交易或者事项进行会计确认、计量和报告。 A、会计主体 B、货币计量 C、持续经营 D、会计分…
-
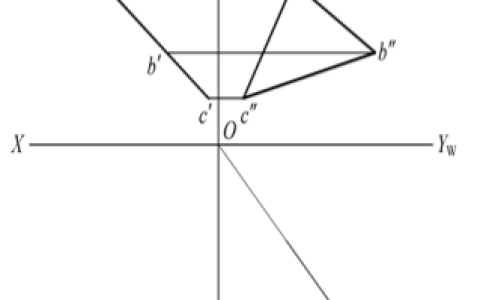
2025年秋江苏开放大学机械制图第一次作业答案
一、2025年秋江苏开放大学机械制图第一次作业单选题答案 1、我国《技术制图》和《机械制图》国家标准,简称国标,代号为()。 A、T/G B、GB/T C、ISO D、OSI 学生答案:B 2、零件不可见的轮廓线用()表示。 A、细实线 B、粗虚线 C、细虚线 D、粗实线 学生答案:C 3、平面图形绘图的顺序是:() A、已知线段-中间线段-连接线段 B、中…
-
2025年秋江苏开放大学法理学第一次作业答案
一、2025年秋江苏开放大学法理学第一次作业单选题答案 1、我国《消费者权益保护法》第四十九条规定:“经营者提供商品或者服务,造成消费者或者其他受害人人身伤害的,应当赔偿医疗费、护理费、交通费等为治疗和康复支出的合理费用,以及因误工减少的收入.”该规则不属于_____。 A、义务性规则 B、确定性规则 C、强行性规则 D、构成性规则 学生答案:D 2、我国《…
-
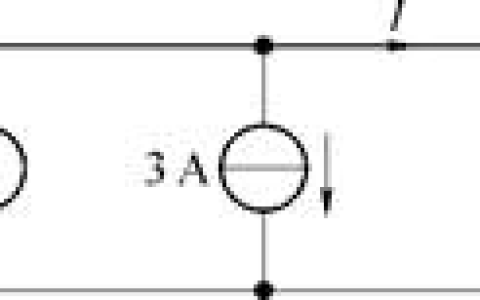
2025年秋江苏开放大学电工电子技术第1次作业答案
一、2025年秋江苏开放大学电工电子技术第1次作业单选题答案 1、两个电路等效,即()相同。 A、外部 B、内部 C、内部和外部 学生答案:A 2、在RLC串联电路中,如果调大电感,则电路()。 A、呈电阻性 B、性质不变 C、感性增强 D、容性增强 学生答案:C 3、图示的电路中,电流I为()。 A、‒3 A B、2 A C、5 A D、‒5 A 学生答案…
-
2025年秋江苏开放大学经济学基础第一次作业答案
一、2025年秋江苏开放大学经济学基础第一次作业单选题答案 1、在消费者收入与商品价格既定条件下,消费者所能购买到的两种商品数量的最大组合的线叫做 A、等产量线 B、企业预算线 C、消费可能线 D、无差异曲线 正确答案:C 2、经济学上所说的稀缺性是指 A、资源的相对有限性 B、资源的绝对稀缺性 C、欲望的相对有限性 D、欲望的无限性 正确答案:A 3、选择…
-
2025年秋江苏开放大学算法设计与分析形考作业2答案
一、2025年秋江苏开放大学算法设计与分析形考作业2单选题答案 1、采用顺序查找方法查找长度为n的线性表时,每个元素的平均查找长度为( )。 A、n/2 B、(n-1)/2 C、(n+1)/2 D、 n 学生答案:C 2、对于顺序存储的有序表(5,12,20,26,37,42,46,50,64),若采用折半查找元素26的比较次数为()。…